SUBMARINE MOUNTAINSELLEN P. METZGERPurpose: Students will create a two-dimensional contour map of a submerged area from a simulated survey using sounding techniques. Suggested Student Grouping: Two students per group.
Framework Integration: Framework: Scale and Structure.
Related Activities:
BACKGROUND INFORMATION Bathymetric maps are topographic maps of landforms that are submerged beneath the ocean or a lake. Mapping the bottom of a body of water presents some special problems because the bottom is not visible. Several techniques are currently used to collect depth data for mapping. When mapping a small, shallow lake it is possible to go out and measure the depth of selected locations with a weight tied to a rope which is lowered over the side of the boat. A long pole can also be marked with depth intervals and used to make soundings. To collect depth data, one must systematically row the boat around the lake and lower the rope over the side of the boat or drop the stick until it reaches the bottom. The sites where depths are measured are marked on a map, and the depth data are used to draw the contour lines for the lake bottom. Because of the vast size and depth of the Earth's oceans, it is not feasible to use this procedure. As a result, systematic mapping of the ocean floors began much later than terrestrial mapping.
It wasn't until the sextant and accurate chronometers were invented that latitude and longitude
could be established on the seas out of sight of land. The invention of the sextant in 1731 by
John Hadley enabled ships' navigators to establish their position relative to visible stars and
constellations. An accurate timepiece recorded the exact times when the angles between the
ship and the stars were fixed, thus allowing a precise latitude and longitude to be determined.
These inventions allowed Captain James Cook to chart newly discovered lands in the South
Pacific in the 1700s. The first scientific expedition to seriously attempt to measure the ocean's depths was the voyage of the British ship H.M.S.Challenger (1872-1876). The voyage of theChallenger lasted nearly three and a half years and logged 68,890 miles (Duxbury and Duxbury, 1991). Weighted wires were lowered over the side of the ship to measure depths out of sight of the land. The Challenger took soundings at 361 sites, collected samples of deep-sea water, made measurements at various depths, conducted studies of ocean circulation, and collected thousands of biological specimens and sediment samples from the ocean floor (Duxbury and Duxbury, 1991). Measuring ocean depth continued in this laborious fashion until the mid 1920's. This method of measuring depths was also used for lakes. The first use of sonar (Sound Navigational Ranging) to locate underwater features was aboard the German research ship Meteor. Sonar devices use echoes from the ocean floor (or other underwater sound emitters such as a ship's hull) to measure ocean depth.The Meteor made 13 Atlantic crossings between 1925 and 1927, mapping the ocean bottom continuously. Sonar systems became highly accurate during World War II, when submarine warfare raged in both the Atlantic and Pacific oceans. Deep-ocean trenches in the western Pacific provided havens for Japanese submarines because they were too deep for sonar to penetrate. The use of sonar to map the sea floor following World War II dispelled any lingering notions that the Earth's ocean floors were featureless plains. Scientists mapped oceanic ridges, submerged islands, plateaus, and trenches — discoveries which helped with the understanding of plate tectonics. In the late 1960's the National Geographic Society published maps showing the topography of the ocean floors, allowing the general public to see the underwater part of the planet for the first time. Today, oceanographers continue to use advanced sonar systems for exploration and detailed mapping of the sea floor. A side-scanning sonar device developed by British scientists is able to map wide bands to the sides of the vessel that tows it, rather than simply obtaining depth data from directly beneath the scanner. This device, which is called GLORIA (Geologic Long-Range Inclined Asdic), has produced very detailed maps of the continental margin adjacent to North America. Another type of sonar, multibeam sonar, emits signals of differing frequencies. This allows for detailed mapping of ocean bottom features in three dimensions. In 1993, GLORIA scientists announced that the largest cluster of volcanoes on earth, encompassing an area the size of Washington state, had been discovered in the Pacific Ocean near the East Pacific Rise. Remarkable new submarine landforms continue to be revealed as the technology for submarine mapping improves.
Many examples of submerged mountains and hills have been discovered on the sea floor.
Many of these features are underwater volcanoes formed in locations where magma rises
from beneath the oceanic crust to erupt on the sea floor (Fig. 1). Figure 1. Volcanic origin of submarine mountains. Dark cross hatched pattern represents coral. Stippled areas around volcanoes represent sediment.
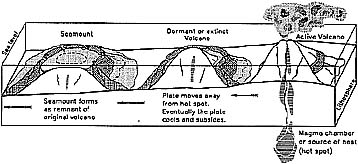
Some of these cones may grow to rise above sea level, forming islands like the Hawaiian chain or the Philippine Islands. After active volcanic eruptions cease, an island may be eroded by wave action until it is first partly submerged and finally completely submerged to form a seamount (Fig 1). Coral reefs growing around the subsiding volcano may form an atoll. Guyots are seamounts with flat tops. Of course, not all seamounts began as islands; some were never tall enough to rise above sea level. A bathymetric map is made just like a topographic map. Once the depth data is plotted on a grid, a line (contour line) is drawn connecting points of the same depth. Once the contour lines are drawn, a two-dimensional picture of the ocean floor or lake bottom becomes visible. (See Background Information in the activity Building a Topographic Model for more information on contour lines, contour intervals, and topographic maps.)
MATERIALS AND PREPARATION
Preparation
PROCEDURES
Modifications: Make models of deep-sea trenches and submarine canyons.
REFERENCES Erickson, S., Gregg, D., Helling, F., King, M.W., and Starkweather, J., 1987, Submerged Islands in Down to Earth, AIMS Education Foundation, Fresno, CA, p. 24-26.
ADDITIONAL REFERENCES AND RESOURCES A related activity — Erickson, S., Gregg, D., Helling, F., King, M.W., and Starkweather, J., 1987, Mapping the Ocean Floor in Down to Earth, AIMS Education Foundation, Fresno, CA, p. 27-29.
GLOSSARY
SUBMARINE MOUNTAINSINTRODUCTIONIn our discussion of plate tectonics and earth movement, we have learned about the formation of submarine landforms. In today's laboratory investigation, you will be creating a two dimensional map of underwater hills or mountains.
PURPOSE
MATERIALS
PROCEDURES
QUESTIONS FOR DISCUSSION
1) How does the model compare with your map?
|
